Здравствуйте, дорогие друзья! Сегодня мы поговорим про достаточно необычное, но для многих полезное и необходимое решение. Это манипулятор своими руками, который можно установить на обычный прицеп.
Кто-то подобные конструкции устанавливает на ГАЗ 53 непосредственно на кузов, либо же на ЗИЛ и на Газель. Другие же используют простые легковые прицепы, совершенствуя их конструкции и расширяя эксплуатационные возможности.
Каким именно будет манипулятор, решать вам. Это может быть гидравлический или ручной с механическим приводом, фактически зависящем от ваших усилий. Это вопрос к тому, какую конкретно лебедку вы купите для реализации поставленной цели.
- Когда и кому может пригодиться
- Сборка конструкции своими руками
- Подготовка прицепа
- Подъемное устройство
- Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
- Пробы и ошибки
- Особенности манипулятора
- Механика
- Электроника
- Программирование
- работы
- Ссылки
- Как сделать манипулятор
- Описание конструкции
- Сервоприводы
- Разработка манипулятора
- Резка оргстекла
- Сборка манипулятора
- Итоги
- UPD1
- UPD2
- Шаг 1: Список материалов
- Шаг 2: Как всё работает
- Шаг 3: Модифицируем джойстик
- Шаг 4: Электропроводка нашего устройства
- Шаг 5: Загрузка кода
- Шаг 6: Запуск проекта
- Рука-манипулятор своими руками: как сделать?
- В целом и общем
- Технические характеристики результата
- Мелкие детали
- Сборка в общих чертах
- Возможные схематические изображения результата
- Заключение
- Как сделать манипулятор в домашних условиях
Когда и кому может пригодиться
Прежде чем рассказать о том, как делается и устанавливается самодельный кран-манипулятор на прицеп легковой машины, стоит затронуть тему необходимости такой конструкции. Соглашусь, что далеко не всем и не всегда он может пригодиться.
Наличие крана-манипулятора на легковом прицепе расширяет его функциональные возможности, увеличивает эксплуатационные характеристики.
Если вам приходится регулярно перевозить какие-то тяжелые предметы, при этом отсутствует самосвальный механизм на прицепе, можно воспользоваться подъемным краном.
Обладая определенными параметрами грузоподъемности, он даст возможность поднимать на борт и спускать с него грузы разного типа. Актуально для строителей, ремонтников, дачников и просто хозяйственников.
Фактически это альтернатива для ручной лебедки на прицепе. Но только кран обладает более широкой сферой применения. Этот вопрос стоит рассмотреть на конкретных примерах.
Возможности прицепа с краном во многом зависят от того, какая грузоподъемность самого автоприцепа и непосредственно созданного своими руками крана. Некоторые модели способны поднять две тонны, но если платформа прицепа на такой груз не рассчитана, могут возникнуть проблемы при эксплуатации и перевозках.
Что же касается непосредственной сферы применения, то тут можно выделить несколько примеров.
Если вы установите на свой автоприцеп кран-манипулятор, то сможете использовать его:
- для леса;
- для поднятия бочек;
- погрузки стройматериалов;
- работы с крупногабаритными предметами;
- переноса груза с места на место в небольшом радиусе;
- поднятия грузов на высоту;
- транспортировки досок и бревен;
- загрузки лодки;
- перевозки мототехники;
- сельскохозяйственных работ;
- в строительных целях и пр.
Вариантов на самом деле много. Они лишь ограничены задачами, которые стоят перед вами, и эксплуатационными характеристиками созданного прицепа с краном-манипулятором.
Сборка конструкции своими руками
Чтобы после первого же применения стрела не деформировалась и не потребовалось разобрать всю конструкцию, к вопросу самостоятельного изготовления нужно подойти максимально ответственно.
Фактически работа подразумевает выполнение 2 этапов.
- Подготовка прицепа. Для начала придется подготовить сам прицеп. Ведь установить кран непосредственно на платформу, особенно когда пол выполнен из фанеры, не получится. Кран займет полезное пространство и не обеспечит нужную эффективность. Потому лучше делать узел за пределами бортов или грузовой платформы. Подготовив площадку для крана, далее наступит следующий этап;
- Изготовление крана и его установка. Собрать кран можно из подручных материалов, но лучше использовать качественные компоненты с нужными параметрами прочности и устойчивости к износу в ходе эксплуатации. Об этом расскажу чуть позже.
Теперь по каждому этапу пройдемся отдельно.
Скажу сразу, что это лишь пример, который вы можете использовать в качестве основы или повторять его с абсолютной точностью. У всех разные прицепы и различные возможности, как и задачи, стоящие перед подобной конструкцией.
Подготовка прицепа
Никто не запрещает вам использовать готовые чертежи из сети. Только предварительно убедитесь, что они правильные, выполнены грамотно и соответствуют реальным характеристикам получаемого крана. Плюс не забывайте, что в некоторых случаях правильнее и проще установить лебедку для прицепа, а не монтировать самодельный манипулятор.
Возможно, кому-то потребуется дополнительно люлька, либо стрела увеличенного размера. Все индивидуально, но в качестве примера одну конструкцию описать стоит. Подкрепить полученные знания всегда можно с помощью фото и видео инструкций, представленных в сети.
https://www.youtube.com/watch?v=spwzLuj22Ys
Перед тем как сделать сам кран, займемся подготовкой автоприцепа. Суть подготовительных мероприятий заключается в следующем:
- подготовить материалы для изготовления конструкции;
- сделать выдвижные подставки из профильной трубы и металлических пластин;
- тем самым автоприцеп будет более устойчивым;
- на основе профильной трубы выполнить прямоугольную раму для монтажа самого крана;
- прикрепить ее к перекладине подрамника;
- внутри одной из труб подставки зафиксировать выдвижную ножку;
- с помощью листового металла вырезать площадку требуемого размера;
- приварить к листу металла отрезок трубы;
- ребрами жесткости дополнительно соединить трубу с площадкой под кран.
Что касается материалов, то профильную трубу лучше брать с сечением около 50×50 мм. Листовой металл не должен быть по толщине менее 5 мм. Отрезок трубы для основания под кран берется в районе 90 мм в диаметре. Длина произвольная, но не менее 300 мм.
Подъемное устройство
Теперь у вас в распоряжении есть прицеп, на котором присутствует специальная подставка и основание для будущего крана-манипулятора. Где именно и с какой стороны делать площадку, решайте сами. Тут есть разные варианты.
Что же касается подъемного устройства, то здесь работа предусматривает выполнение следующих операций:
- из трубы диаметров около 80 мм делается стойка;
- с одного конца стойки параллельно фиксируются две металлические пластины;
- ко второму концу приваривается основание, подготовленное на прицепе;
- внутри основания можно засыпать шарики от подшипников, смазав их маслом;
- тем самым стойка будет свободно вращаться во время работы;
- между пластиками стойки монтируется стрела с помощью болтового соединения;
- стрелу можно сделать из труб с сечением 60×60 и 50×50 мм;
- чтобы стрела регулировалась по наклону и вылету, в трубах и пластинах необходимо высверлить отверстия;
- в них вставляются стороны;
- к стреле далее вваривается ручная лебедка.
Подобный кран теперь осталось только болтами закрепить на прицепе. Сварным методом соединять манипулятор с прицепом не стоит, поскольку вряд ли сотрудники ГИБДД похвалят вас за выезд на дорогу общего пользования с подобным самодельным творением.
Это лишь пример того, как можно собственными силами превратить обычный прицеп в более функциональное прицепное транспортное средство. Далее выбор за вами.
Делитесь своими мыслями и идеями на этот счет. Если знаете, как усовершенствовать конструкцию, жду ваших комментариев.
Спасибо за прочтение! Пожалуйста, оцените статьюПодписывайтесь, оставляйте отзывы, задавайте актуальные вопросы и рассказывайте о нас своим друзьям!
(1 5,00 из 5)
Загрузка…
Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
Привет, гиктаймс!
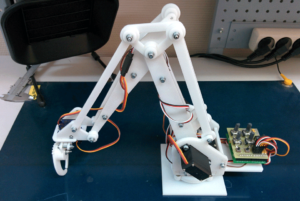
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям. Сейчас моя робо-рука выглядит так:
Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки.
Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора. Красный был уже вполне пригоден к работе.
Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым. Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники.
Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции: Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm.
К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
До появления uArm, настольные манипуляторы подобного класса выглядели достаточно уныло. У них либо не было электроники вообще, либо было какое-нибудь управление с резисторами, либо было свое проприетарное ПО.
Во-вторых, они как правило не имели системы параллельных шарниров и сам захват менял свое положение в процессе работы.
Если собрать все достоинства моего манипулятора, то получается достаточно длинный список:
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки. Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
- Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость. Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм: … и 3мм: С меня за резку всех этих деталей взяли около $10. Основание монтируется на большом подшипнике: Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm.
Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше. Захват собирается отдельно. Он может поворачиваться вокруг своей оси.
Сама клешня сидит прямо на валу двигателя: В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp.
Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал).
В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов.
Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять. Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью.
При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно.
При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу. Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Ссылки
Файлы для резки оргстекла, 3D-модели, список для покупки, чертежи платы и софт можно скачать в конце моей основной статьи.
Подробная инструкция по сборке в фотографиях (осторожно, траффик).
- робо-рука
- манипулятор
- uArm. servo
- сервопривод
- Arduino
Как сделать манипулятор

Рука-манипулятор (см. рис. 15.1) имеет три степени свободы движения. Локтевое сочленение может перемещаться вертикально вверх-вниз по дуге примерно 135°. Плечевой «сустав» перемещает захват вперед и назад по дуге примерно 120°.
Рука может поворачиваться на основании по часовой стрелке или против часовой стрелки на угол примерно 350°. Захват руки робота может брать и удерживать объекты до 5 см в диаметре и поворачиваться вокруг в кистевом сочленении примерно на 340°.
Рис. 15.1. Кинематическая схема движений и поворотов руки-робота
Для приведения руки в движение компания OWI Robotic Arm Trainer использовала пять миниатюрных двигателей постоянного тока. Двигатели обеспечивают управление рукой при помощи проводов. Такое «проводное» управление означает, что каждая функция движения робота (т. е.
работа соответствующего двигателя) управляется отдельными проводами (подачей напряжения). Каждый из пяти двигателей постоянного тока управляет своим движением руки-манипулятора. Управление по проводам позволяет сделать блок контроллера руки, непосредственно реагирующий на электрические сигналы.
Это упрощает схему интерфейса руки робота, который подключается к порту принтера.
Рука изготовлена из легкого пластика. Большинство деталей, несущих основную нагрузку, также выполнены из пластика. Двигатели постоянного тока, использованные в конструкции руки, представляют собой миниатюрные высокооборотные двигатели с низким крутящим моментом.
Для увеличения крутящего момента каждый мотор соединен с редуктором. Двигатели вместе с редукторами установлены внутри конструкции руки-манипулятора. Хотя редуктор увеличивает крутящий момент, рука робота не может поднять или нести достаточно тяжелые предметы.
Рекомендуемый максимально допустимый вес при поднятии составляет 130 г.
https://www.youtube.com/watch?v=HAWqOEFiu4U
Набор для изготовления руки робота и его компоненты представлены на рисунках 15.2 и 15.3.
Рис. 15.2. Набор для изготовления руки-робота
Рис. 15.3. Редуктор перед сборкой
Следующая глава >
Описание конструкции
За основу мы взяли, манипулятор представленный на сайте Kickstarter, который назывался uArm. Авторы этого проекта обещали, что после завершения компании выложат все исходники, но этого не произошло. Их проект представляет собой отличное сочетание качественно сделанного как аппаратного, так и программного обеспечения.
охновившись их опытом мы решили сделать подобный манипулятор самостоятельно. Большинство существующих манипуляторов предполагают расположение двигателей непосредственно в суставах. Это проще конструктивно, но выходит, что двигатели должны поднимать не только полезную нагрузку, но и другие двигатели.
В проекте с Kickstarter’а этого недостатка нет, так как усилия передаются через тяги и все двигатели расположены у основания.
Второе преимущество конструкции в том, что площадка для размещения инструмента (захвата, присоски и т.д.) всегда расположена параллельно рабочей поверхности.
В итоге манипулятор имеет три сервопривода (три степени свободы), которые позволяют ему перемещать инструмент по всем трем осям.
Сервоприводы
Для нашего манипулятора мы использовали сервоприводы Hitec HS-485. Это достаточно дорогие цифровые сервомашинки, но за свои деньги они обеспечивают честное усилие 4,8кг/см, точную отработку позиции и приемлемую скорость.
Их можно заменить на другие с такими же размерами
Разработка манипулятора
Для начала мы составили модель в SketchUp. Проверили конструкцию на собираемость и подвижность.
Нам пришлось немного упростить конструкцию. В оригинальном проекте использовались подшипники, которые сложно купить. Еще мы решили на начальном этапе не делать захват.
Для начала мы планируем сделать из манипулятора управляемый светильник.
Изготавливать манипулятор мы решили из оргстекла. Оно достаточно дешево, хорошо выглядит и легко режется лазером.
Для резки достаточно нарисовать требуемые детали в любом векторном редакторе. Мы сделали это в NanoCad:
В конце статьи мы дадим ссылку на файл в формате *.dwg, для тех кто захочет повторить наш опыт.
Резка оргстекла
Мы заказываем резку оргстекла в компании, находящейся недалеко от Екатеринбурга. Они делают быстро, качественно и не отказываются от небольших заказов. Стоить резка таких деталей будет около 800 рублей. В результате вы получите вырезанные детали с обоих сторон которых находится полиэтиленовая пленка. Эта пленка нужна для защиты материала от образования окалины.
Эту пленку необходимо удалить с обоих сторон.
Еще мы заказали гравировку на поверхности некоторых деталей. Для гравировки достаточно просто нарисовать изображение на отдельном слое и указать это при заказе. Места гравировки необходимо зачистить зубной щеткой и затереть пылью. Получилось очень неплохо:
В итоге после удаления пленки и затирки у нас получилось вот это:
Сборка манипулятора
Для начала необходимо собрать пять частей:
В основании необходимо использовать винты с готовкой в потай. Придется немного рассверлить отверстия, чтобы рука могла поворачиваться.
После того как эти части собраны остается только прикрутить их к качалкам сервоприводов и накинуть тяги для позиционирования инструмента. Достаточно трудно прикрутить именно два привода в основании:
Сначала необходимо установить шпильку длиной 40мм (показана желтой линией на фото), а затем прикрутить качалки.
Для шарниров мы использовали обычные винты М3 и гайки с нейлоновой вставкой для предотвращения самораскручивания. Эти гайки хорошо видно на конце манипулятора:
Пока это просто плоская площадка на которую мы для начала планируем приделать лампочку.
Итоги
Сейчас мы работаем над электроникой и программным обеспечением и скоро расскажем вам о продолжении проекта, так что пока у нас нет возможности продемонстрировать его работу. В перспективе мы планируем оснастить манипулятор захватом и добавить подшипники. Если у Вас возникло желание сделать свой манипулятор — вы можете скачать файл для резки здесь.
https://www.youtube.com/watch?v=Ag8euZThQ3w
Список крепежа, который потребуется:
- М4х10 винт с головкой под внутренний шестигранник, 12шт
- М3х60 винт, 1шт
- М3х40 шпилька, 1шт (возможно придется немного укоротить напильником)
- М3х16 винт с гол. под в/ш, 4шт
- М3х16 винт с головкой в потай, 8шт
- М3х12 винт с гол. под в/ш, 6шт
- М3х10 винт с гол. под в/ш, 22шт
- М3х10 винт с головкой в потай, 8шт
- М2х6 винт с гол. под в/ш, 12шт
- М3х40 стойка латунная мама-мама, 8шт
- М3х27 стойка латунная мама-мама, 5шт
- М4 гайка, 12шт
- М3 гайка, 33шт
- М3 гайка с нейлоновым фиксатором, 11шт
- М2 гайка, 12шт
- Шайбы
UPD1
С момента публикации этой статьи прошло много времени. Первая ее формация была желтой и она была предельно ужасна.
Красную руку уже было не стыдно показать на сайте, но без подшипников она все еще работала не достаточно хорошо, а еще ее было трудно собирать.
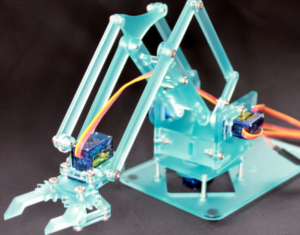
Мы сделали прозрачную версию с подшипниками, которая стала работать уже гораздо лучше и лучше был продуман процесс сборки. Эта версия манипулятора даже успела побывать на нескольких выставках:
Делая прозрачную руку мы понимали, что это не финальная версия. Поработав с ним, мы немного изменили чертежи, увеличили прочность, отработали сборку и недавно собрали окончательную, белую версию:
Сейчас мы готовим все материалы для публикации исходников проекта, так что добавляйте наш сайт в RSS-ридер — скоро будет весело!
UPD2
Ура! Мы закончили работу над манипулятором! Вы можете познакомиться с ним здесь.
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.
Шаг 1: Список материалов
Нам понадобится:
- Плата Ардуино. Я использовал Уно, но любая из разновидностей одинаково хорошо справится с задачами проекта.
- Сервоприводы, 4 самых дешевых, что вы найдёте.
- Материалы для корпуса на ваш вкус. Подойдёт дерево, пластик, метал, картон. Мой проект собран из старого блокнота.
- Если вы не захотите заморачиваться с печатной платой, то понадобится макетная плата. Подойдёт плата небольшого размера, поищите варианты с джамперами и блоком питания — они бывают достаточно дешевы.
- Что-то для основания руки — я использовал банку от кофе, это не самый лучший вариант, но это всё, что я смог найти в квартире.
- Тонкая нить для механизма руки и иголка для проделывания отверстий.
- Клей и изолента, чтобы скрепить всё воедино. Нет ничего, что нельзя было бы скрепить изолентой и горячим клеем.
- Три резистора на 10K. Если у вас не найдётся резисторов, то в коде на такие случаи есть обходной манёвр, однако лучшим вариантом будет купить резисторы здесь.
Шаг 2: Как всё работает
На приложенном рисунке изображен принцип работы руки. Также я объясню всё на словах. Две части руки соединены тонкой нитью. Середина нити соединена с сервоприводом руки. Когда сервопривод тянет нить — рука сжимается. Я оснастил руку пружиной из шариковой ручки, но если у вас есть более гибкий материал, можете использовать его.
Шаг 3: Модифицируем джойстик
Предположив, что вы уже закончили сборку механизма руки, я перейду к части с джойстиком.
Для проекта использовался старый джойстик, но в принципе подойдёт любой устройство с кнопками. Аналоговые кнопки (грибы) используются для управления сервоприводами, так как по сути это просто потенциометры. Если у вас нет джойстика, то можете использовать три обычных потенциометра, но если вы, как и я, модифицируете старый джойстик своими руками, то вот что вам нужно сделать.
Я подключил потенциометры к макетной плате, у каждого из них есть по три клеммы. Одну из них нужно соединить с GND, вторую с +5V на Ардуино, а среднюю на вход, который мы определим позже. Мы не будем использовать ось Y на левом потенциометре, поэтому нам нужен только потенциометр над джойстиком.
https://www.youtube.com/watch?v=HHLRoyDEQOY
Что касается переключателей, соедините +5V с одним его концом, а провод, который идёт на другой вход Ардуино со вторым концом. Мой джойстик имеет общую для всех переключателей линию на +5V. Я подключил всего 2 кнопки, но затем подключил еще одну, так как в ней появилась необходимость.
Также важно обрезать провода, которые идут к чипу (черный круг на джойстике). Когда вы завершите всё вышеописанное, можно приступить к проводке.
Шаг 4: Электропроводка нашего устройства
На фотографии изображена электропроводка устройства. Потенциометры — это рычажки на джойстике. Локоть (Elbow) — это правая ось Y, Основа (Base) — это правая ось X, Плечо (Shoulder) — это левая ось X. Если вам захочется поменять направление движения сервоприводов, просто смените положение проводов +5V и GND на соответствующем потенциометре.
Шаг 5: Загрузка кода
На этом этапе нам нужно скачать приложенный код на компьютер, а затем загрузить его на Ардуино.
Заметка: если до этого вы уже загружали код на Ардуино, то просто пропустите этот шаг — вы не узнаете ничего нового.
- Откройте ИДЕ Ардуино и вставьте в него код
- В Tools/Board выберите вашу плату
- В Tools/Serial Port выберите порт, к которому подключена ваша плата. Скорее всего, выбор будет состоят из одного пункта.
- Нажмите кнопку Upload.
Вы можете изменить диапазон работы сервоприводов, в коде я оставил заметки о том, как это осуществить. Скорее всего, код будет работать без проблем, вам нужно будет лишь поменять параметр сервопривода руки. Этот параметр зависит от того, как вы настроили нить, поэтому я рекомендую точно подобрать его.
Если вы не используете резисторы, то вам нужно будет модифицировать код в том месте, где я оставил об этом заметки.
Файлы
Шаг 6: Запуск проекта
Робот контролируется движениями на джойстике, рука сжимается и разжимается при помощи кнопки для руки. На видео показано, как все работает в реальной жизни.
Вот способ, которым можно запрограммировать руку:
- Откройте Serial Monitor в Ардуино ИДЕ, это позволить проще следить за процессом.
- Сохраните начальную позицию, кликнув Save.
- За один раз двигайте лишь одним сервоприводом, например, Плечо вверх, и жмите save.
- Активируйте руку также только на её шаге, а затем сохраняйте нажатием save. Деактивация также производится на отдельном шаге с последующим нажатием save.
- Когда закончите последовательность команд, нажмите кнопку play, робот перейдёт в начальное положение и затем начнёт двигаться.
- Если вы захотите остановить его — отсоедините кабель или нажмите кнопку reset на плате Ардуино.
Если вы всё сделали правильно, то результат будет похож на этот!
Надеюсь, урок был вам полезен!
Рука-манипулятор своими руками: как сделать?
Мы рассмотрим, как делается рука-манипулятор своими руками, на промышленных образцах. Сначала будут затронуты общие вопросы, потом технические характеристики результата, детали, а под конец и сам процесс сборки.
В целом и общем
Создание данного устройства в целом не должно вызвать каких-то сложностей. Необходимо будет качественно продумать только возможности механических движений, что будет довольно сложно осуществить с физической точки зрения, чтобы рука-манипулятор выполняла поставленные перед ней задачи.
Технические характеристики результата
Будет рассматриваться образец с параметрами длины/высоты/ширины соответственно 228/380/160 миллиметров. Вес руки-манипулятора, своими руками сделанной, будет составлять примерно 1 килограмм. Для управления используется проводной дистанционный пульт. Ориентировочное время сборки при наличии опыта – около 6-8 часов.
Если его нет, то могут уйти дни, недели, а при попустительстве и месяцы, чтобы была собрана рука-манипулятор. Своими руками и одному в таких случаях стоит делать разве что для своего собственного интереса. Для движения составляющих используются коллекторные моторы. Приложив достаточно усилий, можно сделать прибор, который будет поворачиваться на 360 градусов.
Также для удобства работы, кроме стандартного инструментария вроде паяльника и припоя, необходимо запастись:
Пульт дистанционного управления можно реализовать, используя кнопки и микроконтроллер. При желании сделать дистанционное беспроводное управление элемент контроля действий понадобится и в руке-манипуляторе.
В качестве дополнений необходимы будут только устройства (конденсаторы, резисторы, транзисторы), которые позволят стабилизировать схему и передавать по ней в нужные моменты времени ток необходимой величины.
Мелкие детали
Для регуляции количества оборотов можно использовать переходные колесики. Они позволят сделать движение руки-манипулятора плавными.
https://www.youtube.com/watch?v=HMNUfEpRjPw
Также необходимо позаботится о том, чтобы провода не усложняли её движения. Оптимальным будет проложить их внутри конструкции. Можно сделать всё и извне, такой подход сэкономит время, но потенциально может привести к сложностям в перемещении отдельных узлов или всего устройства. А теперь: как сделать манипулятор?
Сборка в общих чертах
Теперь приступаем непосредственно к созданию руки-манипулятора. Начинаем с основания. Необходимо обеспечить возможность поворота устройства во все стороны. Хорошим решением будет его размещение на дисковой платформе, которая приводится во вращение с помощью одного мотора. Чтобы она могла вращаться в обе стороны, существует два варианта:
Какой из предложенных вариантов выбрать, зависит исключительно от вас. Далее делается основная конструкция. Для комфорта работы необходимо два «сустава». Прикреплённый к платформе должен уметь наклоняться в разные стороны, что решается с помощью двигателей, размещённых в его основании.
Ещё один или пару следует разместить в месте локтевого изгиба, чтобы часть захвата можно было перемещать по горизонтальной и вертикальной линии системы координат. Далее, при желании получить максимальные возможности, можно установить ещё двигатель в месте запястья. Далее наиболее необходимое, без чего не представляется рука-манипулятор.
Своими руками предстоит сделать само устройство захвата. Тут существует множество вариантов реализации. Можно дать наводку по двум самым популярным:
Далее остаётся сделать пульт, с помощью которого будет оказываться влияние на отдельные двигатели и темпы их работы. И можно приступать к экспериментам, используя робот-манипулятор, своими руками сделанный.
Возможные схематические изображения результата
Рука-манипулятор своими руками предоставляет широкие возможности для творческих измышлений. Поэтому предоставляются вашему вниманию несколько реализаций, которые можно взять за основу для создания своего собственного устройства подобного предназначения.
Любая представленная схема манипулятора может быть усовершенствована.
Заключение
Важным в робототехнике является то, что практически не существует ограничения по функциональному улучшению. Поэтому при желании создать настоящее произведение искусства не составит труда. Говоря о возможных путях дополнительного улучшения, следует отметить кран-манипулятор.
Своими руками сделать такое устройство не составит труда, одновременно оно позволит приучить детей к творческому труду, науке и конструировании. А это в свою очередь позитивно может сказаться на их будущей жизни. Сложно ли будет сделать кран-манипулятор своими руками? Это не так проблемно, как может показаться на первый взгляд.
Разве что стоит позаботиться о наличии дополнительных мелких деталей вроде троса и колёс, по которым он будет крутиться.
Как сделать манипулятор в домашних условиях
Привет, гиктаймс!
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад.
Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники.
Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
https://www.youtube.com/watch?v=sd4Vh9SFPpk
Сейчас моя робо-рука выглядит так:
Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.







